Safety-Critical Control for Higher-Order Systems
Constructing rigorous control system designs for high-dimensional, complex nonlinear systems can be exceptionally difficult. Classical tools from nonlinear control theory such as backstepping provide a constructive framework for designing controllers using simplified models that yield designs for full-order models. My work focuses on extending these tools to the safety-critical control setting.
Safe Backstepping with Control Barrier Functions
Andrew J. Taylor, Pio Ong, Tamas G. Molnár, and Aaron D. Ames, in Proceedings of the IEEE 61st Conference on Decision and Control (CDC), Cancún, Mexico, 2022.
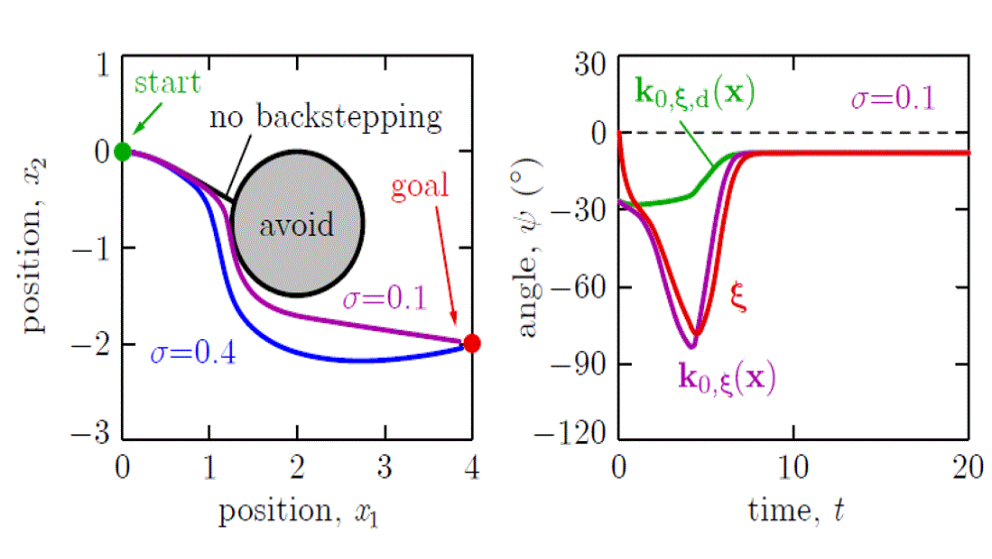
Abstract: Complex control systems are often described in a layered fashion, represented as higher-order systems where the inputs appear after a chain of integrators. While Control Barrier Functions (CBFs) have proven to be powerful tools for safety-critical controller design of nonlinear systems, their application to higher-order systems adds complexity to the controller synthesis process—it necessitates dynamically extending the CBF to include higher order terms, which consequently modifies the safe set in complex ways. We propose an alternative approach for addressing safety of higher-order systems through Control Barrier Function Backstepping. Drawing inspiration from the method of Lyapunov backstepping, we provide a constructive framework for synthesizing safety-critical controllers and CBFs for higher-order systems from a top-level dynamics safety specification and controller design. Furthermore, we integrate the proposed method with Lyapunov backstepping, allowing the tasks of stability and safety to be expressed individually but achieved jointly. We demonstrate the efficacy of this approach in simulation.