Research Overview
My research has focused on two overarching challenges: designing robust controllers for systems with uncertainty, and constructing hierarchical control frameworks for complex nonlinear systems. The following categories highlight the different uncertainties and hierarchical control frameworks I have studied. Click the text links to see more about a specific research challenge and my work on the topic. A complete list of my publications and invited presentations may be found at the bottom of the page.



Publications
Preprints
Ryan K. Cosner, Preston Culbertson, Andrew J. Taylor, Aaron D. Ames, "Robust Safety under Stochastic Uncertainty with Discrete-Time Control Barrier Functions", submitted to Robotics: Sciences and Systems XIX (RSS), 2023.
Kim P. Wabersich, Andrew J. Taylor, Jason J. Choi, K. Sreenath, Claire J. Tomlin, Aaron D. Ames, and Melanie N. Zeilinger, "Data-Driven Safety Filters: Hamilton-Jacobi Reachability, Control Barrier Functions, and Predictive Methods for Uncertain Systems", submitted to IEEE Control Systems, 2022.
Anil Alan, Andrew J. Taylor , Chaozhe R. He, Aaron D. Ames, and Gabor Orosz, "Control Barrier Functions and Input-to-State Safety with Application to Automated Vehicles", submitted to IEEE Transactions on Control Systems Technology (TCST), 2022.
Journal Papers
Anil Alan, Andrew J. Taylor, Chaozhe R. He, Gabor Orosz, and Aaron D. Ames, "Safe Controller Synthesis with Tunable Input-to-State Safe Control Barrier Functions", IEEE Control Systems Letter, vol. 6, pp. 908-913, 2021.
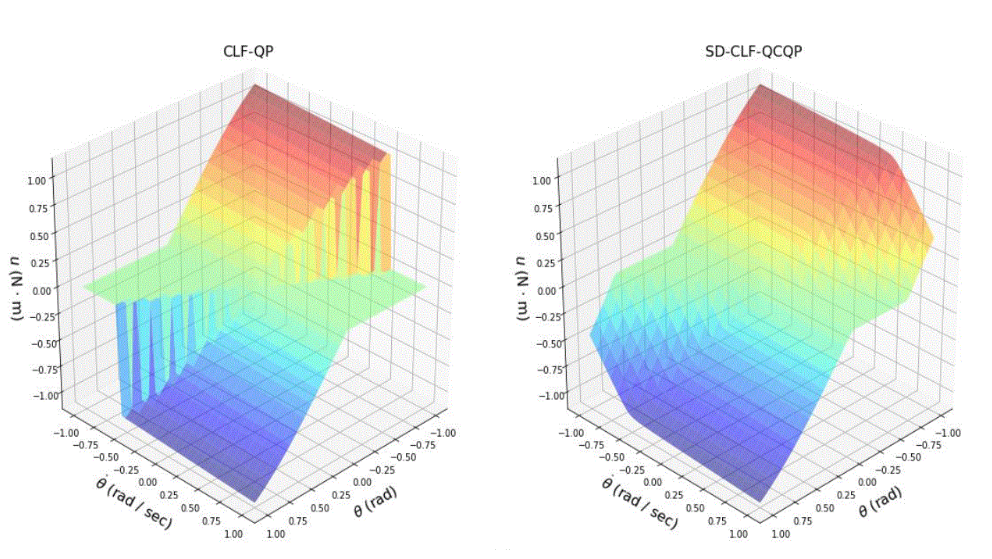
Andrew J. Taylor, Victor D. Dorobantu, Yisong Yue, Paulo Tabuada, and Aaron D. Ames, "Sampled-Data Stabilization with Control Lyapunov Functions via Quadratically Constrained Quadratic Programs", IEEE Control Systems Letters, vol. 6, pp. 680-685, 2021.
Andrew J. Taylor, Andrew Singletary, Yisong Yue, and Aaron D. Ames, "A Control Barrier Perspective on Episodic Learning via Projection-to-State Safety", IEEE Control Systems Letters, vol. 5, no.3, pp. 1029-1024, 2021.
Andrew J. Taylor, Pio Ong, Jorge Cortés, and Aaron D. Ames, "Safety-Critical Event-Triggered Control via Input-to-State Safe Barrier Functions", IEEE Control Systems Letters, vol. 5, no. 3, pp. 749-754, 2021.
Conference Papers
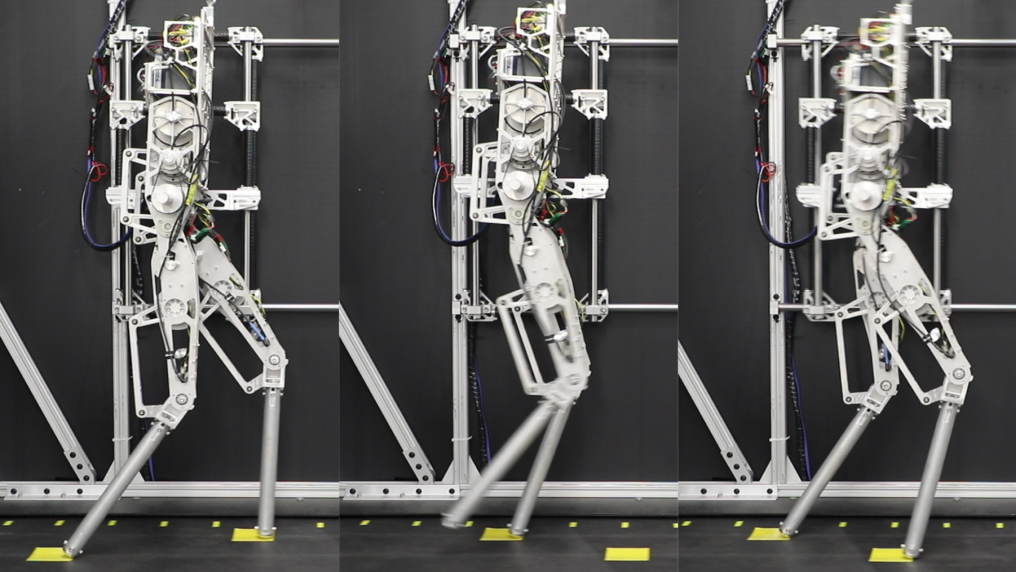
Manuel Y. Galliker, Noel Csomay-Shanklin, Ruben Grandia, Andrew J. Taylor, Farbod Farshidian, Marco Hutter, and Aaron D. Ames, "Bipedal Locomotion with Nonlinear Model Predictive Control: Online Gait Generation using Whole-Body Dynamics", in Proceedings of the IEEE-RAS Conference on Humanoid Robots (Humanoids), Ginowan, Okinawa, Japan 2022.
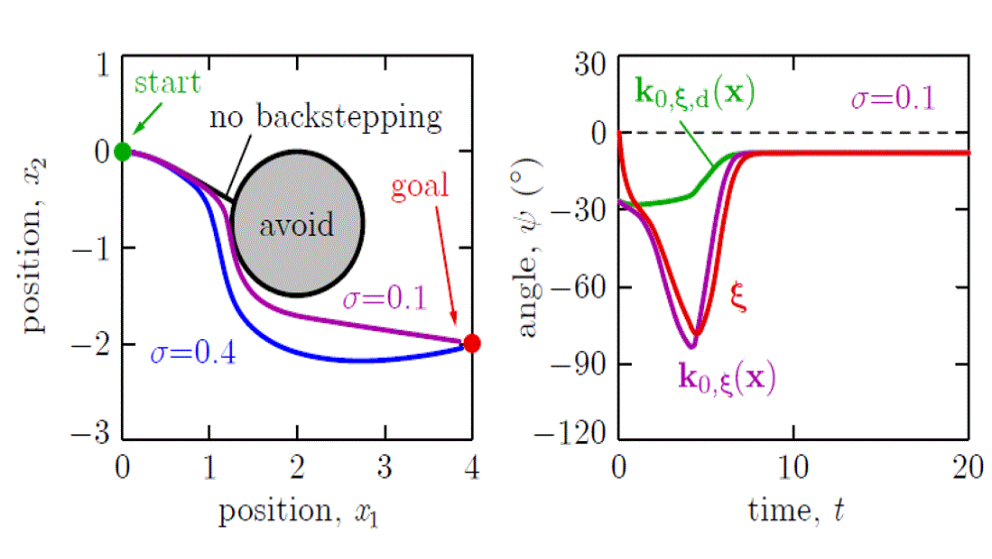
Andrew J. Taylor, Pio Ong, Tamas G. Molnár, and Aaron D. Ames, "Safe Backstepping with Control Barrier Functions", in Proceedings of the IEEE 61st Conference on Decision and Control (CDC), Cancún, Mexico, 2022.
Noel Csomay-Shanklin, Andrew J. Taylor, Ugo Rosolia, and Aaron D. Ames, "Multi-Rate Planning and Control of Uncertain Nonlinear Systems: Model Predictive Control and Control Lyapunov Functions", in Proceedings of the IEEE 61st Conference on Decision and Control (CDC), Cancún, Mexico, 2022.
Andrew J. Taylor, Victor D. Dorobantu, Ryan K. Cosner, Yisong Yue, and Aaron D. Ames, "Safety of Sampled-Data Systems with Control Barrier Functions via Approximate Discrete Time Models", in Proceedings of the IEEE 61st Conference on Decision and Control (CDC), Cancún, Mexico, 2022.
Ryan K. Cosner, Maegan Tucker, Andrew J. Taylor, Kejun Li, Tamas G. Molnár, Wyatt Ubellacker, Anil Alan, Gabor Orosz, Yisong Yue, and Aaron D. Ames, "Safety-Aware Preference-Based Learning for Safety-Critical Control", in Proceedings of the 4th Conference on Learning for Dynamics and Control (L4DC), Palo Alto, CA, USA, 2022, pp. 1020-1033.
Andrew J. Taylor, Victor D. Dorobantu, Sarah Dean, Benjamin Recht, Yisong Yue, and Aaron D. Ames, "Towards Robust Data-Driven Control Synthesis for Nonlinear Systems with Actuation Uncertainty", in Proceedings of the IEEE 60th Conference on Decision and Control (CDC), Austin, TX, USA, 2021, pp. 6469-6476.
Ryan K. Cosner, Andrew W. Singletary, Andrew J. Taylor, Tamas G. Molnár, Katherine L. Bouman, and Aaron D. Ames, "Measurement-Robust Control Barrier Functions: Certainty in Safety with Uncertainty in State", in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 2021, pp.6286-6291.
Noel Csomay-Shanklin, Ryan K. Cosner, Min Dai, Andrew J. Taylor, and Aaron D. Ames, "Episodic Learning for Safe Bipedal Locomotion with Control Barrier Functions and Projection-to-State Safety", in Proceedings of the 3rd Conference on Learning for Dynamics and Control (L4DC), Zürich, Switzerland, 2021, pp. 1041-1053.
Ruben Grandia, Andrew J. Taylor, Aaron D. Ames, and Marco Hutter, "Multi-Layered Safety for Legged Robots via Control Barrier Functions and Model Predictive Control", in Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Xi'an, China, 2021, pp. 8352-8358.
Mohamed Maghenem, Andrew J. Taylor, Aaron D. Ames, and Ricardo G. Sanfelice, "Adaptive Safety Using Control Barrier Functions and Hybrid Adaption", in Proceedings of the IEEE American Control Conference (ACC), New Orleans, LA, USA, 2021, pp. 2418-2423.
Sarah Dean, Andrew J. Taylor, Ryan K. Cosner, Benjamin Recht, and Aaron D. Ames, "Guaranteeing Safety of Learned Perception Modules via Measurement-Robust Control Barrier Functions", in Proceedings of the 4th Conference on Robotics Learning (CoRL), Boston, MA, USA, 2020.
Ruben Grandia, Andrew J. Taylor, Andrew Singletary, Marco Hutter, and Aaron D. Ames, "Nonlinear Model Predictive Control of Robotic Systems with Control Lyapunov Functions", in Proceedings of Robotics: Science and Systems XVI (RSS), Bend, OR, USA, 2020.
Andrew J. Taylor, Andrew Singletary, Yisong Yue, and Aaron D. Ames, "Learning for Safety-Critical Control with Control Barrier Functions", in Proceedings of the 2nd Conference on Learning for Dynamics and Control (L4DC), Berkeley, CA, USA, 2020, pp. 708-717.
Andrew J. Taylor and Aaron D. Ames, "Adaptive Safety with Control Barrier Functions", in Proceedings of the IEEE American Control Conference (ACC), Denver, CO, USA, 2020, pp. 1399-1405.
Andrew J. Taylor, Victor D. Dorobantu, Meera Krishnamoorthy, Hoang M. Le, Yisong Yue, and Aaron D. Ames, "A Control Lyapunov Perspective on Episodic Learning via Projection to State Stability", in Proceedings of the IEEE 58th Conference on Decision and Control (CDC), Nice, France, 2019, pp. 1448-1455.
Andrew J. Taylor, Victor D. Dorobantu, Hoang M. Le, Yisong Yue, and Aaron D. Ames, "Episodic Learning with Control Lyapunov Functions for Uncertain Robotic Systems", in Proceedings of the IEEE/RSJ International Conference on Intelligent Robotics and Systems (IROS), Macau, China, 2019, pp. 6878-6884.
Invited Presentations
Sarah Dean, Andrew Taylor, “Towards Certifiably Safe Nonlinear Control with Sensor and Dynamics Uncertainties”, NeurIPS 5th Robot Learning Workshop: Trustworthy Robotics, Recorded Presentation, 2022.
Andrew J. Taylor, “A Control Lyapunov Function Approach to Episodic Learning”, 1st Conference on Learning for Dynamics and Control (L4DC), Poster Presentation, 2019.